Hej.
Jag heter Peder Nordlöf och bor i Piteå. Min tanke är att kunna delta i de F3Bel tävlingar som går av stapeln här uppe i Norr- och Västerbotten under 2011.

Modellen jag tänkt konvertera består av följande hopplock:
Vingen är till ¾ min egen och till ¼ lånad av farsgubben.
Vingen härstammar från mitten av -90 talet, formgjuten i egna formar.
Vingen flögs sista gången på ett NM i Örebro och störtade i en superstall i sista speedsvängen. (Med denna vinge innehar jag mitt personbästa i speed 15.86s - flygningen innan kraschen.) Kroppen kommer från en senare modell vars namn jag glömt, formbyggd av kevlar, kolfiber & glasfiber.
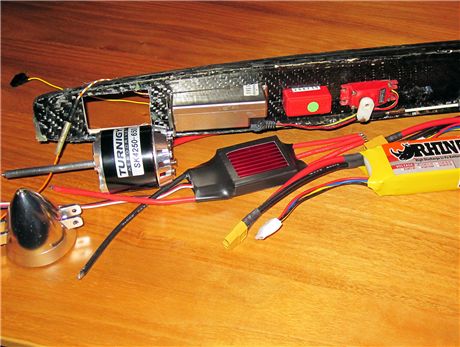
Här är den utrustning som det är tänkt att jag skall försöka pressa in.
Utöver detta tillkommer en höjdmätare samt en BEC / mottagaracc.
Den stora utmaningen, förutom att rymma elutrustningen,
blir att få till tyngdpunkten utan en massa bly längst bak.
Kommer att köra med 5 eller 6 celler alt 3 celler
som en "Lättare termik setup".
Räknar med en ineffekt på dryga kilowatten och en flygvikt på
ca 2.6kg, dvs motsvarande drygt 300-400gram ballast i rent F3B utförande. Denna ballast vill jag minnas motsvarar ungefär distanslast & lätt speedlast.
Vingen börjar bli klar. Jag har just insett att vingdelarna jag plockat ihop förmodligen är 16år gamla!
- Nya servon är installerade
- Nya roder linkage
- Kabelhärvan konverterad från mpx till jr kontakter
- Nya rodertätningar
- Limmat & tejpat diverse sprickor i framkanten
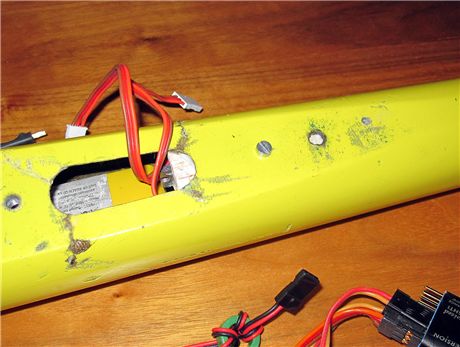
Jag har sågat hål i "läppen" för att få plats med drivaccarna,
där det tidigare var utrymme för ballast (2st blyfyllda kopparrör).
Detta gick över förväntan, endast ett litet hål behövdes.
Läppen känns fortfarande styv o stabil – tack o lov för det –
den skall hålla för närmare 300 gram motor + dess vridmoment.

Höjdmätaren är en liten mackapär som går att programmera
via usb-kabel så att motorn slår av när exempelvis 200m höjd uppnåtts.
Det går även att logga höjden, (läge för höjd-rekord-försök?)
eller för att se vad man kan uppnå för vertikala stighastigheter.

Nästan så att jag köpte för stor motor. Hoppas den inte vibrerar allt för mycket, för då lär noskonen bli uppnött.
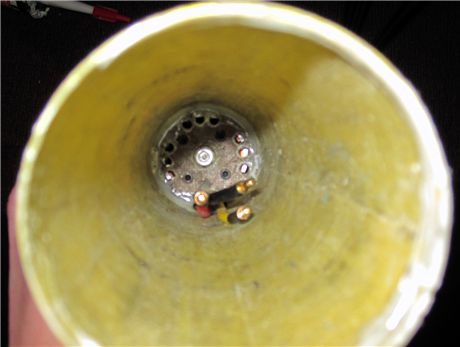
Bestämde mig slutligen för att fästa motorn med en konventionell motorvägg som limmas i noskonen.
I bakkant på motorväggen skall det sitta styrpinnar,
som skall passa i läppen. Detta för att ytterligare styva upp motorinfästningen. Fastnade för denna lösningen då det är enkelt att ta loss konan vid batteribyte/laddning och att läppen & konan samverkar för att få en så stadig motorinfästning som möjligt.
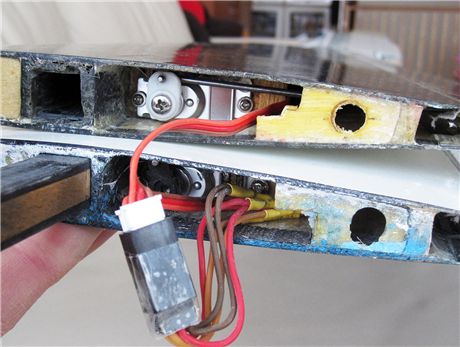
Höjdroderservona är monterade. Det blev en liten speciallösning.
Servona är flyttade 350mm längre bak för att ge plats åt motorbatterierna.
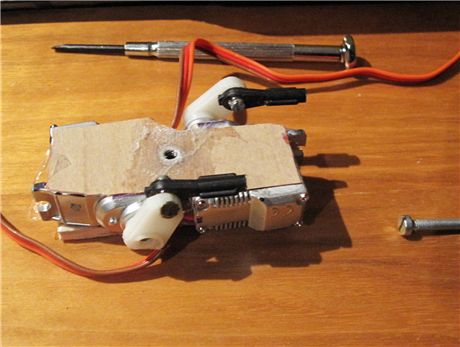
Limmade ihop servona och satte en mutter mittemellan.
Detta för att kunna fixera dom med en skruv genom kroppen.
Nya stötstänger tillverkades också av 2mm glasfiberstång
och en fyrkantig kolfiberstång.

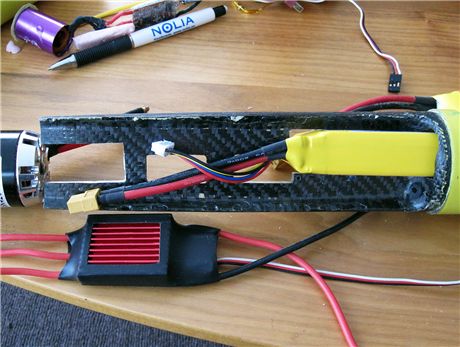
Äntligen! – Alla sladdar tillverkade…
Provmonterade mottagare – fartreglage – bec – höjdmätare
och det verkar fungera. Monterade sedan ur allt för att gjuta in de sista styrningarna mellan noskon, motorspant och läpp.
Vikten verkar hamna på 2580gram med 6 celler & med 3 celler 2390gram.

Har börjat att skära ut höjdroder i den nya v-stabben och tillverka nya linkage. Den nya stabben är ca 30 gram lättare än den gamla.
Den är oanvänd, men tillverkad för typ 15 år sedan.
Den gamla var lite mosad efter en oförklarlig krasch i Boden för ett par år sedan, då även orginalvingen blev obrukbar.
Det kommer mera...
/Peter Nordlöf